デュアルボードヘディングは、2枚のGNSSボードを使って高精度なヘディングを実現します。2つのアンテナから位置情報を受信し、ボード内部のアルゴリズムとデータ処理により、デバイスの姿勢と方位を計算します。デュアルボード方位は、オートステアシステムに適用することができ、農業機械に正確な方向制御と位置決めを提供します。それでは、2つのSinoGNSSを使用して、どのようにデュアルボードヘディングを行うことができるのでしょうか? K803ライト ボードは?

2 デュアルボード・ヘディングの原理
デュアルボード・ヘディングは、2つのアンテナから衛星信号を受信する2つの独立したGNSSボードに依存しています。主な原理は以下の通りです:
(1) ベースラインベクトルの計算
2つのアンテナ間の一定の距離を基線と呼ぶ。衛星からの信号を同時に受信することで、2つの基板はアンテナ間の相対的な変位と方向を計算することができ、このベクトルが基線ベクトルとなる。
(2) 位相差計算
2つのアンテナが同じ衛星からの信号を受信すると、それぞれの位置が異なるために位相差が生じます。この位相差を正確に測定することで、GNSSボードはアンテナ間の相対角度を計算し、デバイスの方位を得ることができます。
(3) ヘディングとピッチの計算
地球座標系に沿った基線ベクトルの方向は、ボードがデバイスの方位を計算するのに役立つ。基線の長さと2つのアンテナで受信した信号の組み合わせにより、システムは装置の方位とピッチを正確に出力することができる。
3 デュアルボード・ヘディング構成
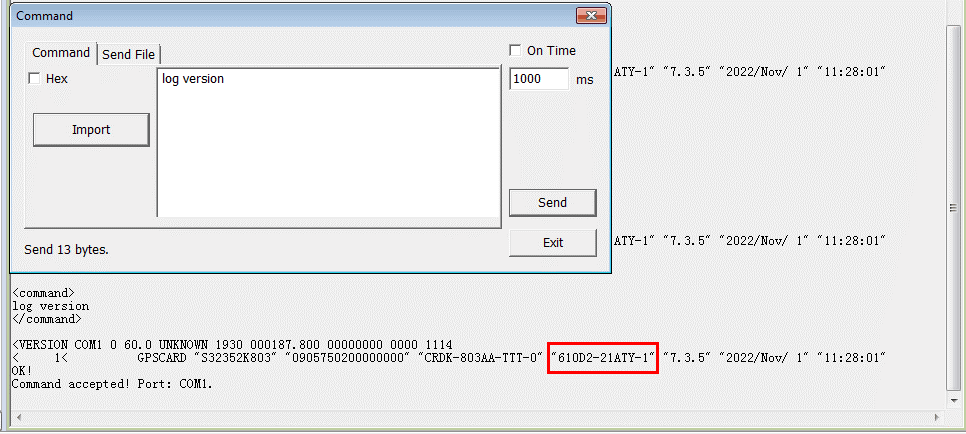
(1) ファームウェアのアップグレード
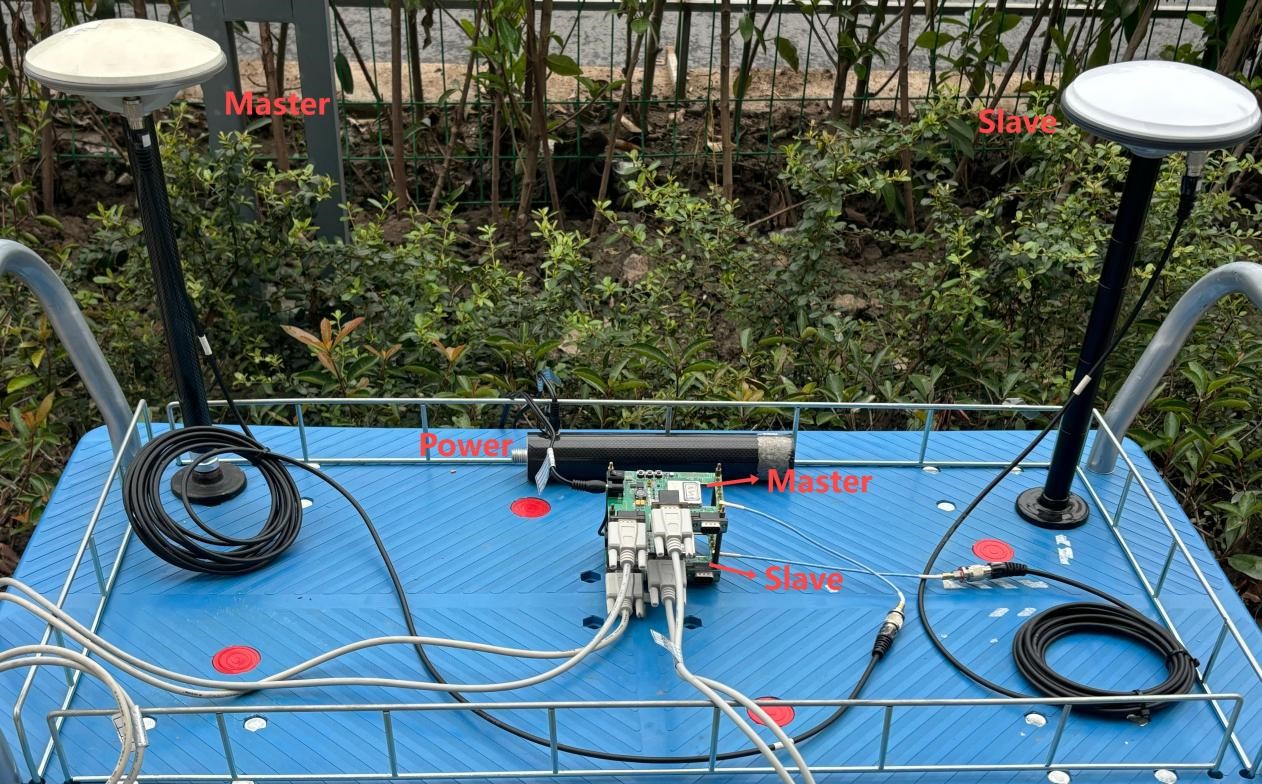
(2) ハードウェアのセットアップ
アンテナのレイアウト: 2本のアンテナをある基線距離に設置する必要がある。通常、基線長が長いほど指向精度は高くなる。アンテナは傾かないように平行に設置する。
ボードの接続: この2つを接続する。 K803ライト ボードを2つのアンテナにそれぞれ接続し、アンテナとボードのインターフェイス間の安定した接続を確保します。最適な衛星信号受信を保証するために、アンテナを障害物から遠ざけてください。マスターの com4 をスレーブの com4 に接続する。
(3) ソフトウェアのセットアップ
差動信号構成: デュアル・ボードのヘッディングには差動データ・サポートが必要で、2つのボードは RTCM のようなプロトコルで差動データを交換します。ボードの差動信号伝送が正しく設定されていることを確認してください。
➥ マスター構成
com4が差分データを転送し、com4がスレーブから差分データを受信するように設定する。差分データの送信間隔は0.2sです。ボーレートを921600に設定し、現在の設定を保存する。コマンドは以下の通りである:
set stationmode master com4 com4 0.2
com4 921600
セーブコンフィグ
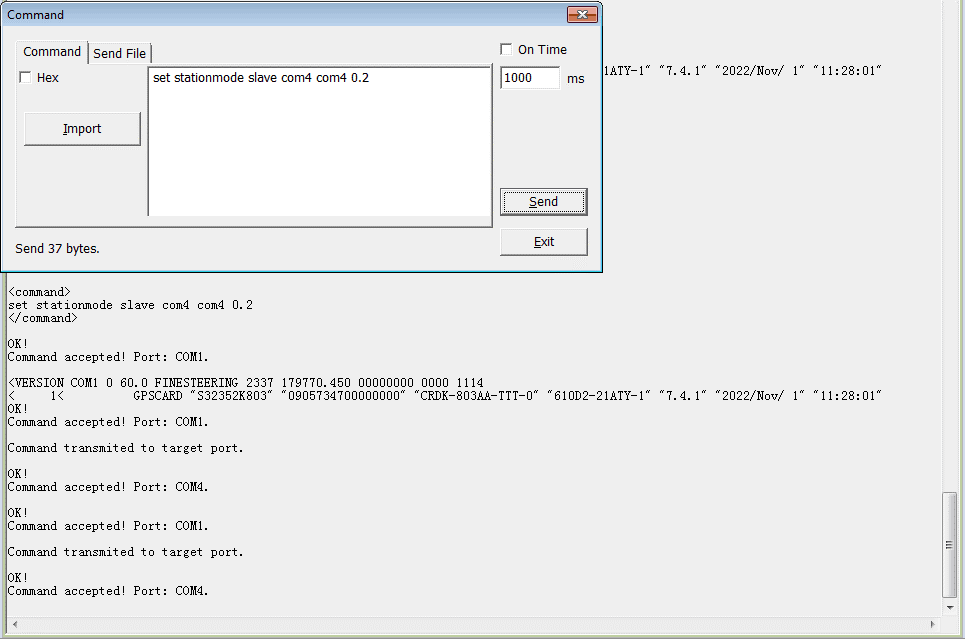
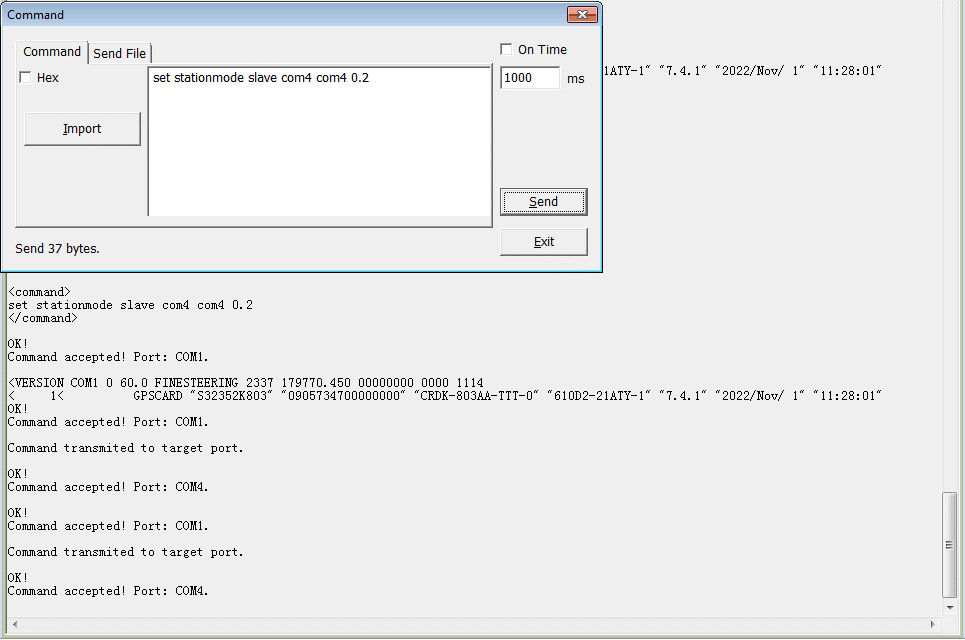
➥ スレーブ構成
com4がマスターから差分データを受信し、com4が差分データを送信するように設定する。差分データの送信間隔は0.2sです。ボーレートを921600に設定し、現在の設定を保存する。コマンドは以下の通りである:
セット ステーションモード スレーブ com4 com4 0.2
com4 921600
セーブコンフィグ
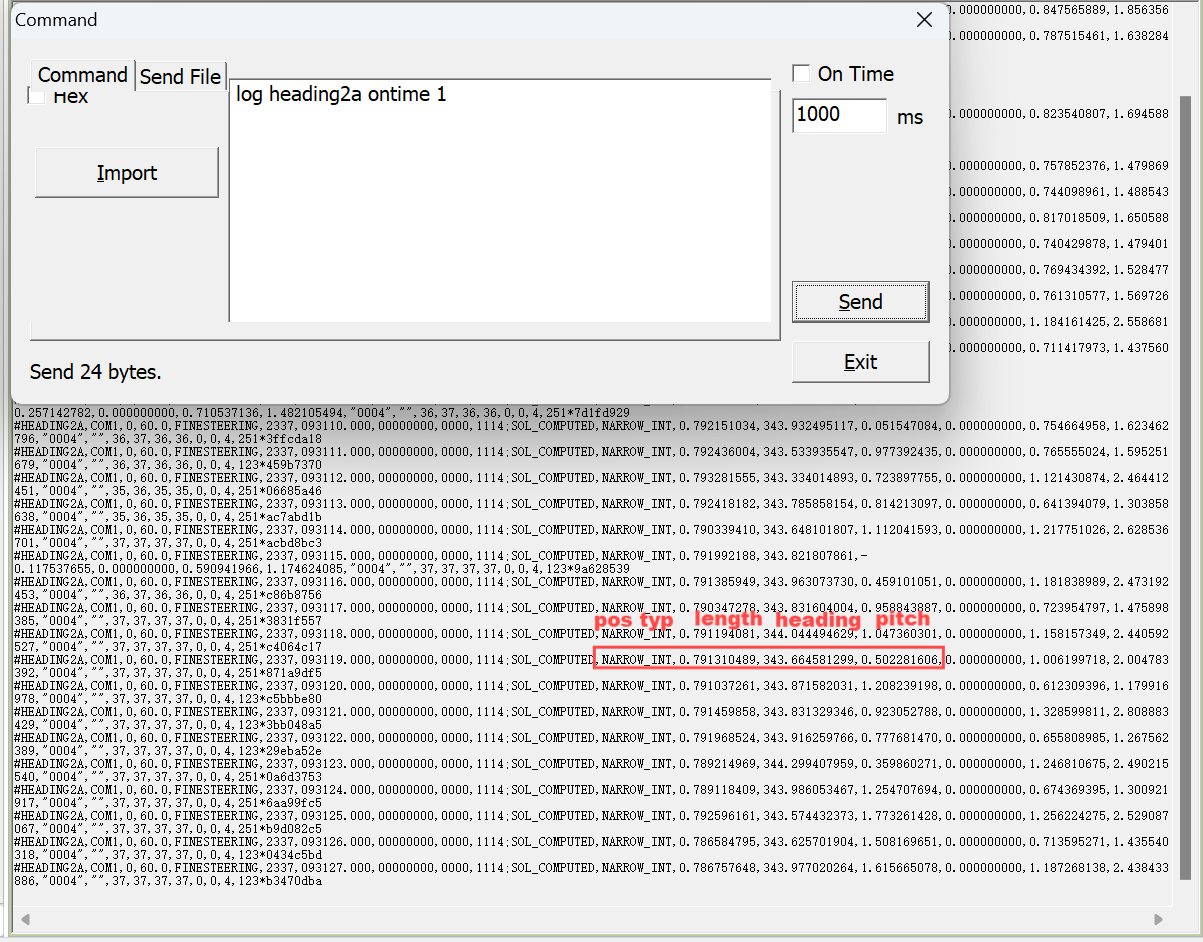
ヘディング情報出力: Heading2aはマスタとスレーブ間の方位情報です。測位タイプ、基線長、方位、ピッチなどの方位情報は、ログ heading2a ontime 1 で取得できます。
ログ heading2a ontime 1
注:NARROW_INTは位置決めタイプで、固定解を示す。
4 結論
デュアルボード方位制御技術は、高精度の方位制御を必要とするアプリケーションに信頼性の高いソリューションを提供します。例えば、オートステアシステムでは、機械方位の正確な決定を可能にし、ナビゲーションシステムと統合して正確な誘導と操作を保証します。正確な基線ベクトル計算と位相差分解能により、デバイスは方位とピッチの情報を素早く得ることができます。GNSS技術の進歩に伴い、デュアルボード方位計の応用範囲と精度は今後さらに向上し、様々な産業により効率的な測位ソリューションを提供します。