Dual-board heading uses two GNSS boards to achieve high-precision heading. By receiving positional information from two antennas, the internal algorithms and data processing of the boards calculate the device’s attitude and azimuth. Dual-board heading can be applied in autosteer systems, providing precise directional control and positioning for agricultural machinery. So, how can we perform dual-board heading using two SinoGNSS K803 Lite boards?

2 Principle of dual-board heading
Dual-board heading relies on two independent GNSS boards that receive satellite signals from two antennas. The main principles include the following:
(1) Baseline vector calculation
The fixed distance between the two antennas is referred to as the baseline. By receiving satellite signals at the same time, the two boards can calculate the relative displacement and direction between the antennas, and this vector is the baseline vector.
(2) Phase difference calculation
When two antennas receive signals from the same satellite, a phase difference occurs due to their different positions. By accurately measuring this phase difference, the GNSS board can calculate the relative angle between the antennas to get the heading of the device.
(3) Heading and pitch calculation
The direction of the baseline vector aligned with the earth coordinate system helps the boards calculate the device’s heading. With the combination of the baseline length and the signals received by the two antennas, the system can accurately output the device’s heading and pitch.
3 Dual-board heading configuration
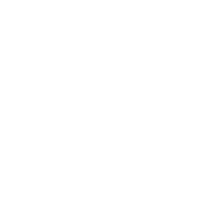
(1) Firmware upgrade
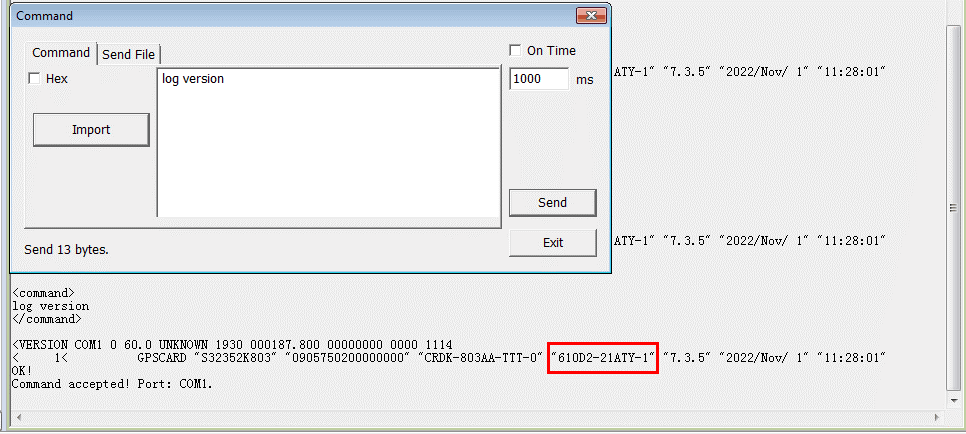
(2) Hardware setup
Antenna layout: Two antennas need to be installed at a certain baseline distance. Usually the longer the baseline length, the higher the directional accuracy. The antennas should be installed parallel to each other to avoid tilting.
Board connection: Connect the two K803 Lite boards to the two antennas respectively, ensuring a stable connection between the antennas and the board interfaces. Keep the antennas away from obstructions to guarantee optimal satellite signal reception. Connecting com4 of the master to com4 of the slave.
(3) Software setup
Differential signal configuration: Dual-board heading requires differential data support, with the two boards exchanging differential data via protocols such as RTCM. Ensure that the differential signal transmission for the boards is properly configured.
➥ Master configuration
Set com4 transit differential data and set com4 receive differential data from slave. Differential data transmission interval is 0.2s. Set the baudrate to 921600 and save the current configuration. The commands are as follows:
set stationmode master com4 com4 0.2
com com4 921600
saveconfig
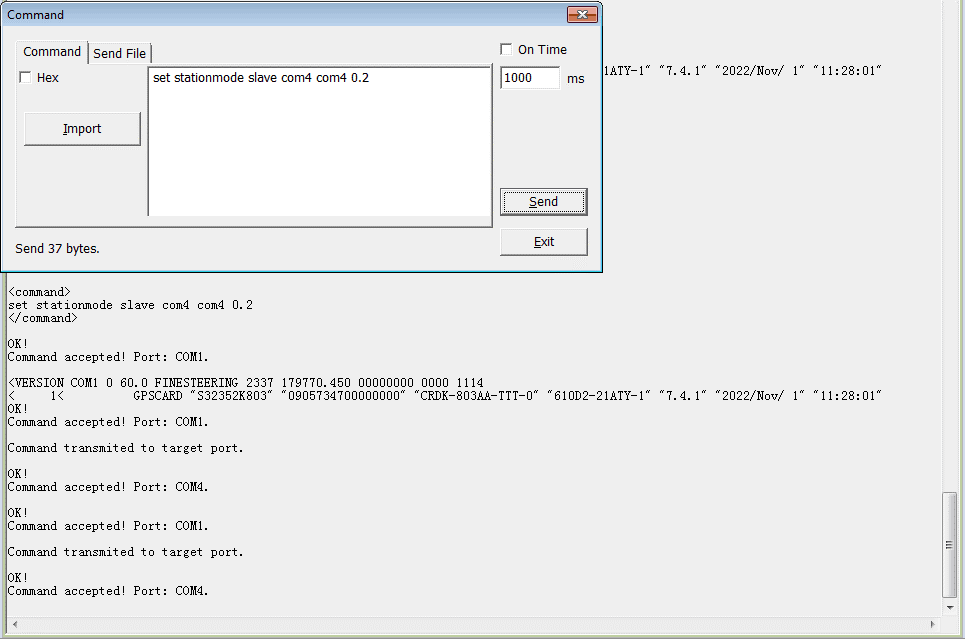
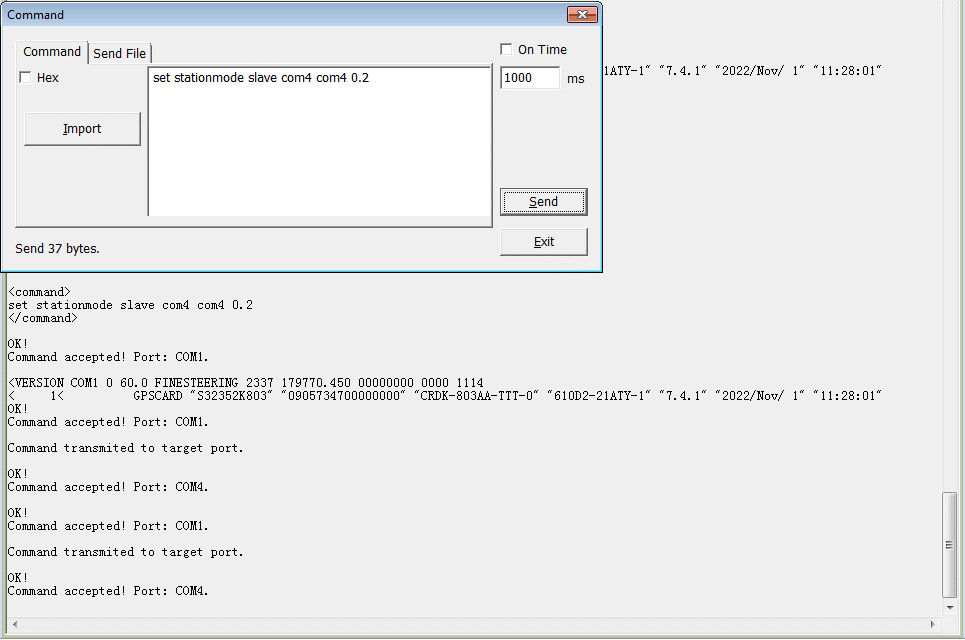
➥ Slave configuration
Set com4 receive differential data from master and set com4 transmit differential data. Differential data transmission interval is 0.2s. Set the baudrate to 921600 and save the current configuration. The commands are as follows:
set stationmode slave com4 com4 0.2
com com4 921600
saveconfig
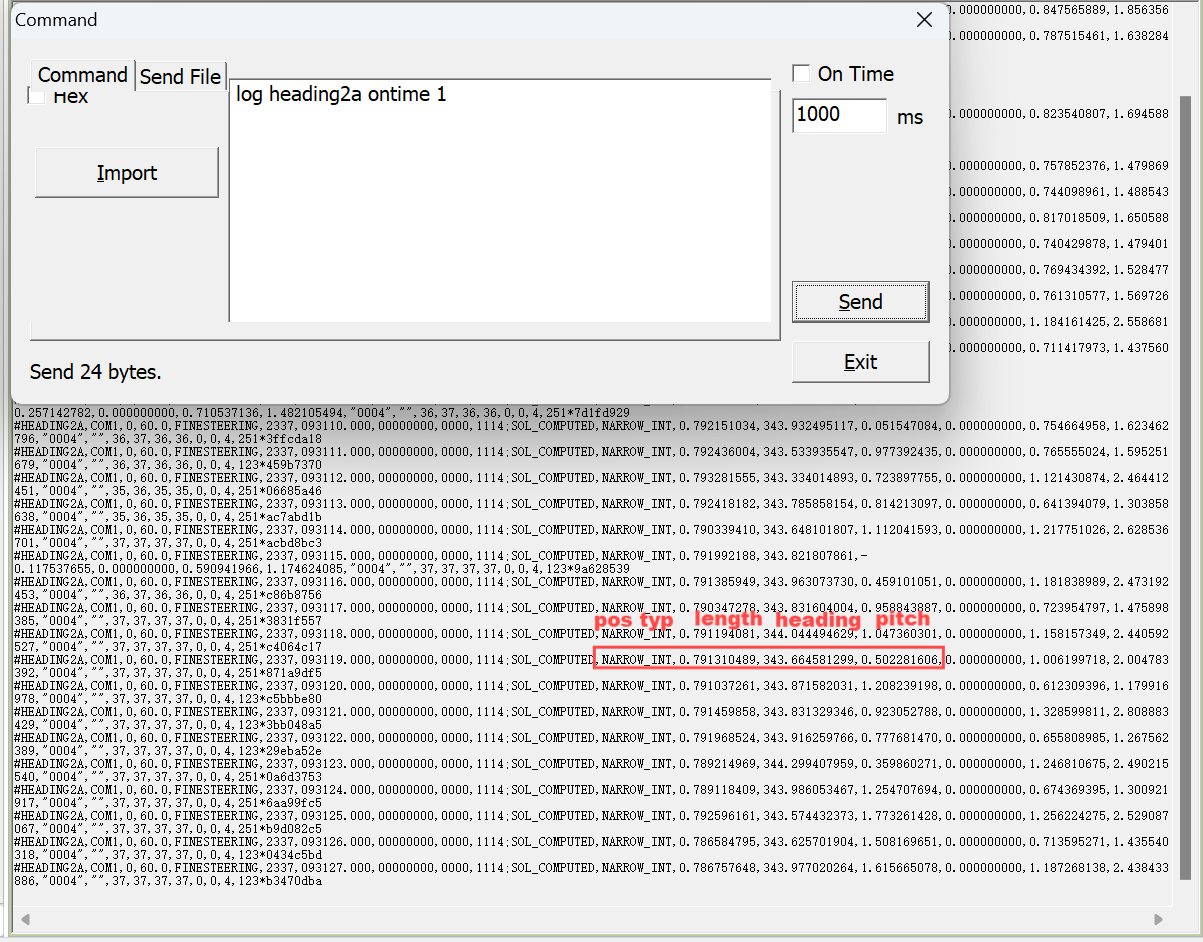
Heading information output: The heading2a is the heading information between the master and the slave. The heading information such as positioning type, baseline length, heading and pitch can be obtained by log heading2a ontime 1.
log heading2a ontime 1
Note: NARROW_INT is the positioning type, denoting the fixed solution.
4 Conclusion
Dual-board heading technology provides a reliable solution for applications requiring high-precision directional control. For instance, in autosteer systems, it enables accurate determination of machinery heading and integrates with navigation systems to ensure precise guidance and operation. Through precise baseline vector calculations and phase difference resolutions, the device can quickly obtain heading and pitch information. With the advancement of GNSS technology, the application range and accuracy of dual-board heading will further improve in the future, delivering more efficient positioning solutions for various industries.